
EzCad2UNI User’s Manual
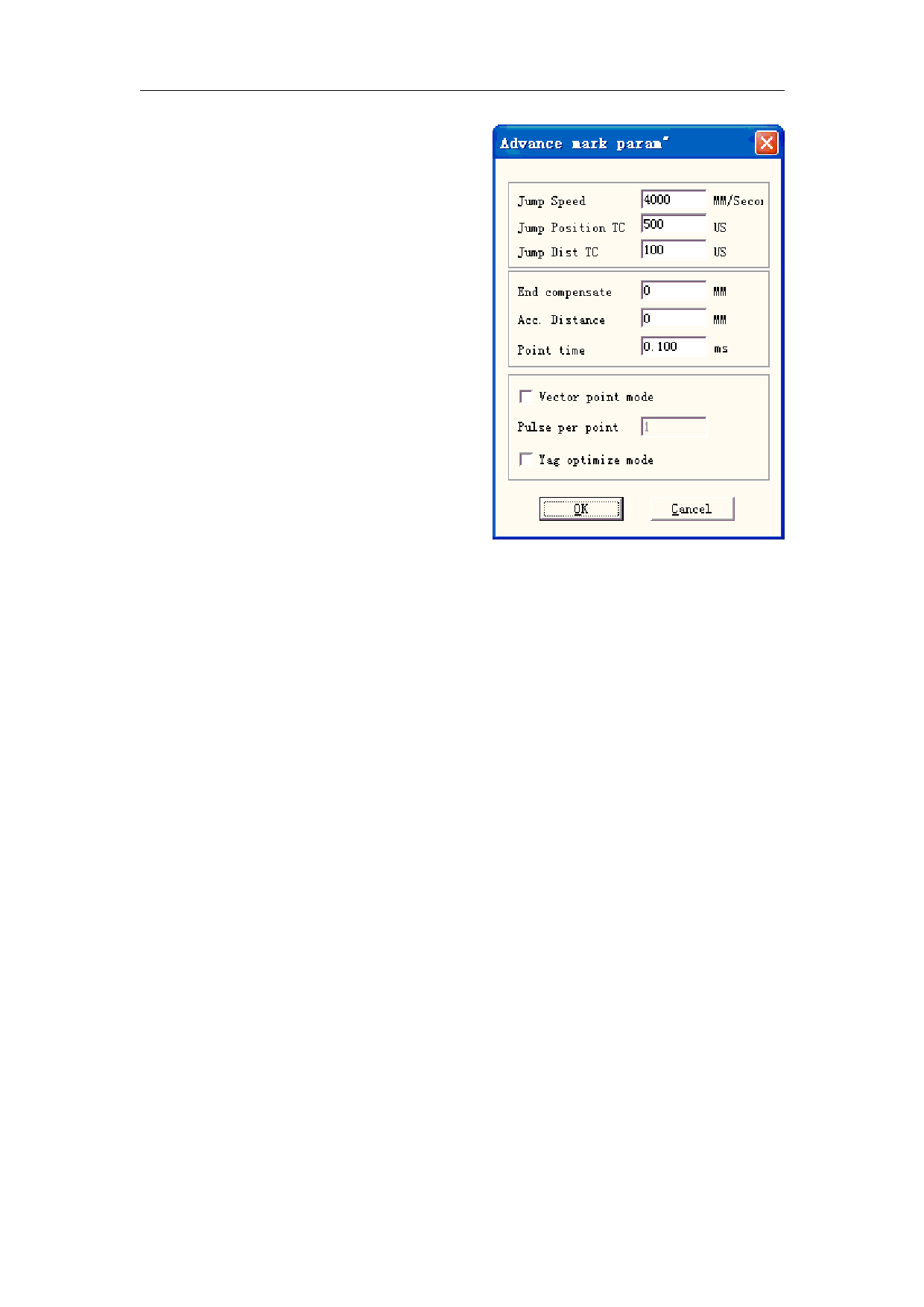
Jump Speed: set a jump speed of the scanner
for the current parameter
Jump Position TC | Jump Dist TC: After
each jump movement, the system will delay some
time then execute the next command. The actual
delay time is calculated by the following formula:
Total delay = (Jump Distance *Jump Dist TC) +
Jump Position TC
End compensate: Only when in high-speed
operation or this parameter need not to be set. This
parameter is used to mark a little bit more as an
ending increment at the end of an operation.
Negative value is supported.
Acc Distance: In those applications that
require laser marking without variation of intensity,
we have to add an accelerated segment before the
start point to reach the homogenous marking
results.
Point Time: This parameter is used to set the
marking time if there are dot objects.
Figure 10-5 Advanced
Vector point mode/Pulse per point: Marking the vector graph using point mode, and force
the pulse number while marking each point
YAG optimize mode: While marking on the high reflection material using YAG laser,
optimize the hatch arithmetic. Note: the function is used to resolve the irregular lines when
marking on the high reflection material using YAG laser. If you want to use this function, you
must connect the PWM signal to the pulse modulate signal of the Q-switch.
Now let’s take it into practice:
Mark a rectangle with size 40×20 and fill it with the following parameters: Mark Contour/
Edge offset=0 / Line Distance =1.0 /Hatch Angle= 0 / Unidirectional hatch
Set the marking parameters like this:
Parameter Name: XX ---- the name users customize (easy to understand it’s means.);
Loop count: 1;
Marking Speed: XX ---- the speed users need;
Jump Speed: XXX ---- the jump speed users customize (It is suggested to use 1200 –2500.);
Power Percentage: 50%;
Frequency: 5KHZ;
Start TC: 300;
End TC: 300;
Polygon TC: 100;
Jump Position TC: 1000;
Jump Distance TC: 1000;
56
All rights reserved
 LabelMark Marking Software Manual, v3.6")
 LabelMark Marking Software Manual, v3.6")
 LabelMark Marking Software Manual, v3.6")
 LabelMark Marking Software Manual, v3.6")
 LabelMark Marking Software Manual, v3.6")
 LabelMark Marking Software Manual, v3.6")
 LabelMark Marking Software Manual, v3.6")
 LabelMark Marking Software Manual, v3.6")
 LabelMark Marking Software Manual, v3.6")